参考与前言
carla官方对于docker 运行的描述:
CARLA in Docker
Docker的使用:[暂时没贴]
相关已知issue,欢迎补充
https://github.com/carla-simulator/carla/issues/4834
使用的初衷是:因为收集数据的时候,想开多个carla,但是一个carla 3-4G显存,奈何我的电脑就仅仅6G显存 1660Ti,所以就萌生了这个想法。但是呢 途中发现:
Carla 0.9.10.1 的版本 docker可以运行 但是必须有DISPLAY的设备 不然如果DISPLAY给空的话 就会没有 → 但是呢 你在本地运行的时候 可以DISPLAY为空 也可以正常运行
Carla 0.9.12 的版本 就可以运行做到offscreen (后面会解释这个词)
回到开始,所以呢 主要就是介绍怎样在docker中运行carla,以及这些的作用,好处等,前面介绍了较多关于渲染的东西,要是觉得烦,直接目录跳转docker处
1. 渲染 Rendering
off-screen & no-rendering
官方文档:
Rendering options
首先我们要知道 off-screen 和 no-rendering各自的意义是什么,从字面上,一个是离屏但是渲染继续,一个是直接不做图形渲染
No-rendering mode: 虚幻引擎不会做任何渲染,图形学方面的计算都是没有的,所以基于GPU的所有传感器返回的是空数据
它有助于在非常高的频率下进行大量的交通模拟和道路行为。
Off-screen mode: 虚幻引擎还是正常工作,渲染都在计算中,传感器也会返回值,只是没有display 显示选项了而已
那什么时候用什么呢?正常其实如果还在debug 调试阶段,其实一般都是需要display 做上帝俯视视角掌控一下全局的
对于你不需要传感器数据,只是用来做交通流的仿真的时候,no-rendering mode是一个不错的选择,例如:我只是看看我基于ground truth (不基于传感器感知) 的agent的整体运行路径的表现效果,比如撞车等,可以使用这种模式,十分迅速
对于off-screen呢 主要是觉得显示界面有的烦,就可以配合 tmux 进行搭配,这样主机只要不关机/ 服务器不关机 这都在继续运行 终端退出了也不碍事,也不会出现误触关掉
所以,了解了原理后,如何开启各个所需模式呢?
off screen
0.9.12及之后的版本 只有有renderoffscreen,也就是离屏模式:
./CarlaUE4.sh -RenderOffScreen
1
0.9.11及之前的 就可以使用opengl,把DISPLAY 给空就行(但这步在docker并不适用)
# Linux
DISPLAY= ./CarlaUE4.sh -opengl
1
2
vulkan的步骤请见官方文档,需要安装驱动等其他sudo所需权限apt install等
no rendering
可以在py代码里读取到world后设置:
settings = world.get_settings()
settings.no_rendering_mode = True
world.apply_settings(settings)
...
settings.no_rendering_mode = False
world.apply_settings(settings)
也可以单独开一个终端窗口 通过官方提供的 config.py 进行设置
cd PythonAPI/util && python3 config.py --no-rendering
cd PythonAPI/util && python3 config.py --rendering
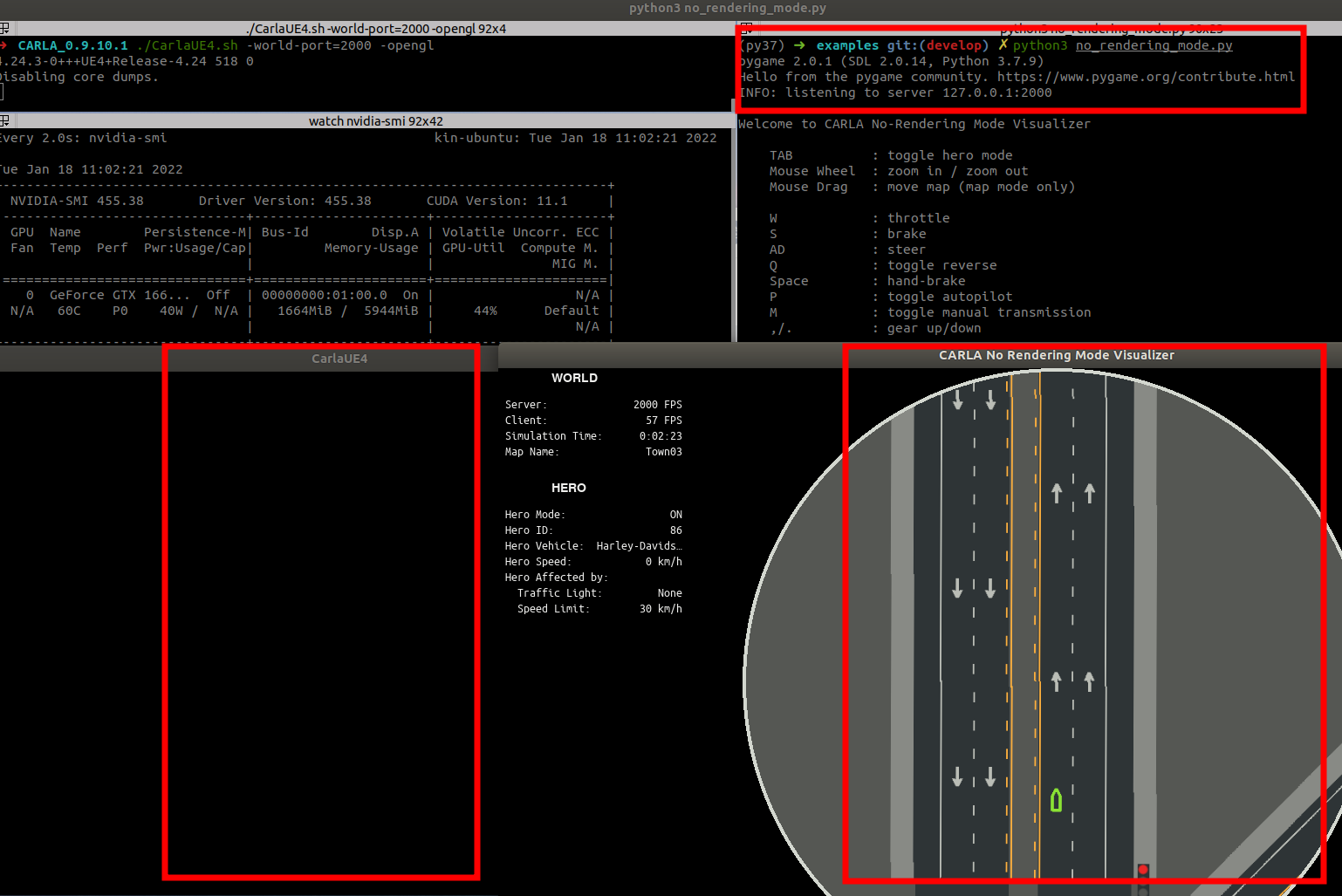
cd PythonAPI/examples && python3 no_rendering_mode.py
前两种应该知道在说什么,如图所示(1是带渲染的,2是不带渲染的 注意这种模式下界面也会变黑,传感器也都没有数据):

后一种是一种鸟瞰图形式,也是无渲染 节约型的,如下图所示:
首先 如果你不追求收集的图片传感器的质量的话,为了提高效率 使用低质量渲染也是一种不错的选择,注意 这点会影响天空的渲染,更多可以自己尝试一下

左边是低质量,右边是正常epic质量
./CarlaUE4.sh -quality-level=Low
./CarlaUE4.sh -quality-level=Epic
另外在Carla 0.9.12之前的版本,还有opengl和vulkan的选择,我记得我在哪个issue里读到过 opengl的渲染没有vulkan的好,有时候屏幕/传感器收到的数据会出现黑点
而0.9.12之后就只留下了vulkan的渲染模式
2. Docker 中运行
首先 docker 安装,基本指令等等等 就不讲了 前面的部分放了参考链接,很多教程也可熟悉
大概是这样一幅图,感觉还是看图一目了然在干什么事:

摘自 carla github 官方的老0.8版本的repo
https://github.com/carla-simulator/data-collector
pull/build
此处先以官方为准,讲简洁型pull方案,build等后面补充吧
因为可以两个docker net对上了 就能连上,所以carla完全作为多个容器开着,对好自己的另一个运行的环境的端口就行
docker pull,其实和 git clone 异曲同工之处
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/qq_39537898/article/details/122557353
文章
11.94W+人气
19粉丝
1关注
更多数字孪生可视化干货内容






 扫一扫关注公众号
扫一扫关注公众号
 扫一扫联系客服
扫一扫联系客服
©Copyrights 2016-2022 杭州易知微科技有限公司 浙ICP备2021017017号-3  浙公网安备33011002011932号
浙公网安备33011002011932号
互联网信息服务业务 合字B2-20220090







