本篇文章介绍Unity下如何导入机器人的URDF模型,主要参考官方教程:https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/urdf_importer/urdf_tutorial.md
关于导入的机器人模型选择了turtlebot3 waffle pi作为示例
1.Unity中导入URDF Importer的包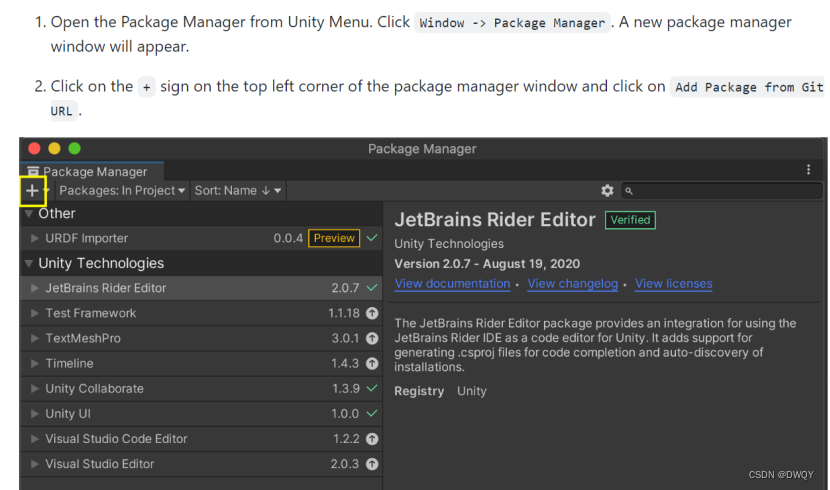
如果按照URL导入就输入下面这个:
https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer#v0.5.2
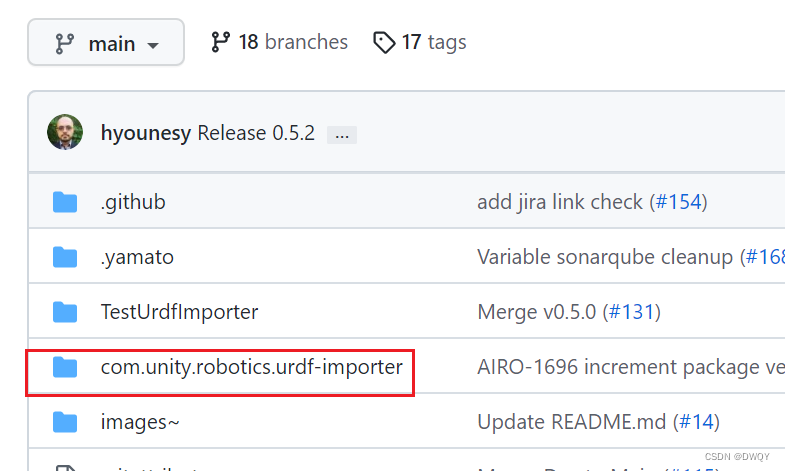
有的时候网络不好,就手动从本地磁盘导入:
在这个网址下载源码包,然后把选择磁盘导入,选择com.unity.robotics.urdf-importer目录下的package.json导入即可:Unity-Technologies/URDF-Importer: URDF importer (github.com)
ps:所以前提是先有模型的urdf.xacro文件,然后按照命令生成urdf文件

3.Unity中文件配置
3.1在Unity下Assets文件夹下生成一个urdf文件夹,并在urdf下导入turtlebot3_description文件夹。
其他机器人也一样,会有一些相关的mesh配套文件。
ps:turtlebot3_description来源:turtlebot3/turtlebot3_description at master · ROBOTIS-GIT/turtlebot3 (github.com)
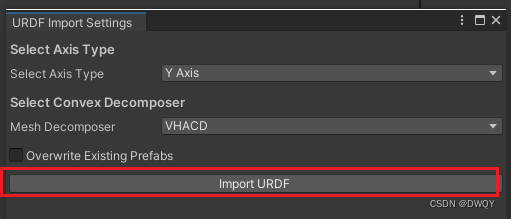
3.2 鼠标右击urdf文件,选择”Import Robot from Selected URDF file”
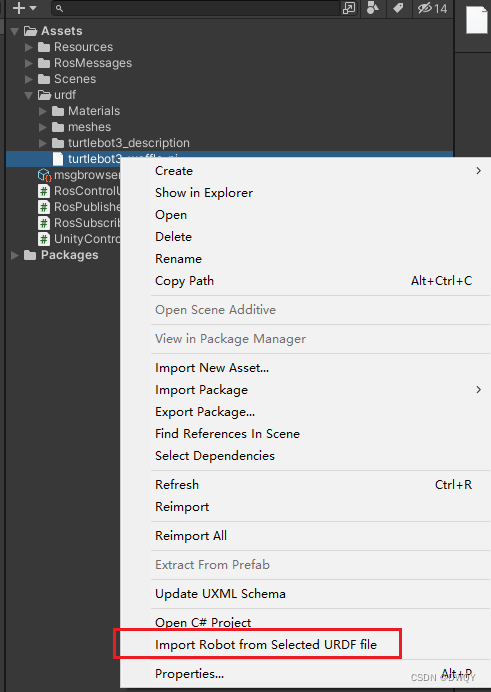
选择你主要的轴(Y轴或者Z轴),然后”import URDF”
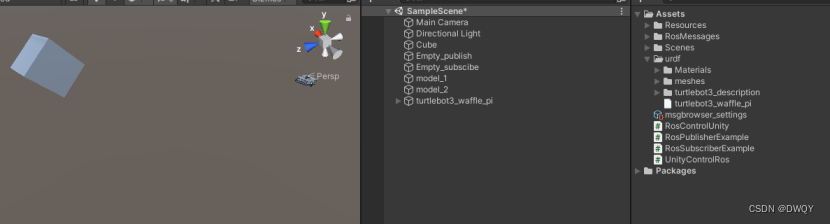
然后在试图界面中就能看到模型啦,生成结果如下:
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/gls_nuaa/article/details/128034844
文章
11.99W+人气
19粉丝
1关注
更多数字孪生可视化干货内容






 扫一扫关注公众号
扫一扫关注公众号
 扫一扫联系客服
扫一扫联系客服
©Copyrights 2016-2022 杭州易知微科技有限公司 浙ICP备2021017017号-3  浙公网安备33011002011932号
浙公网安备33011002011932号
互联网信息服务业务 合字B2-20220090







