双臂复合升降机器人的手眼标定是属于眼在手外的标定模式,相机在机器人的头部,标定前应固定相机的位置,再打开我们的标定软件程序如下,给足文件权限后,打开主程序,运行后会出现如下界面。
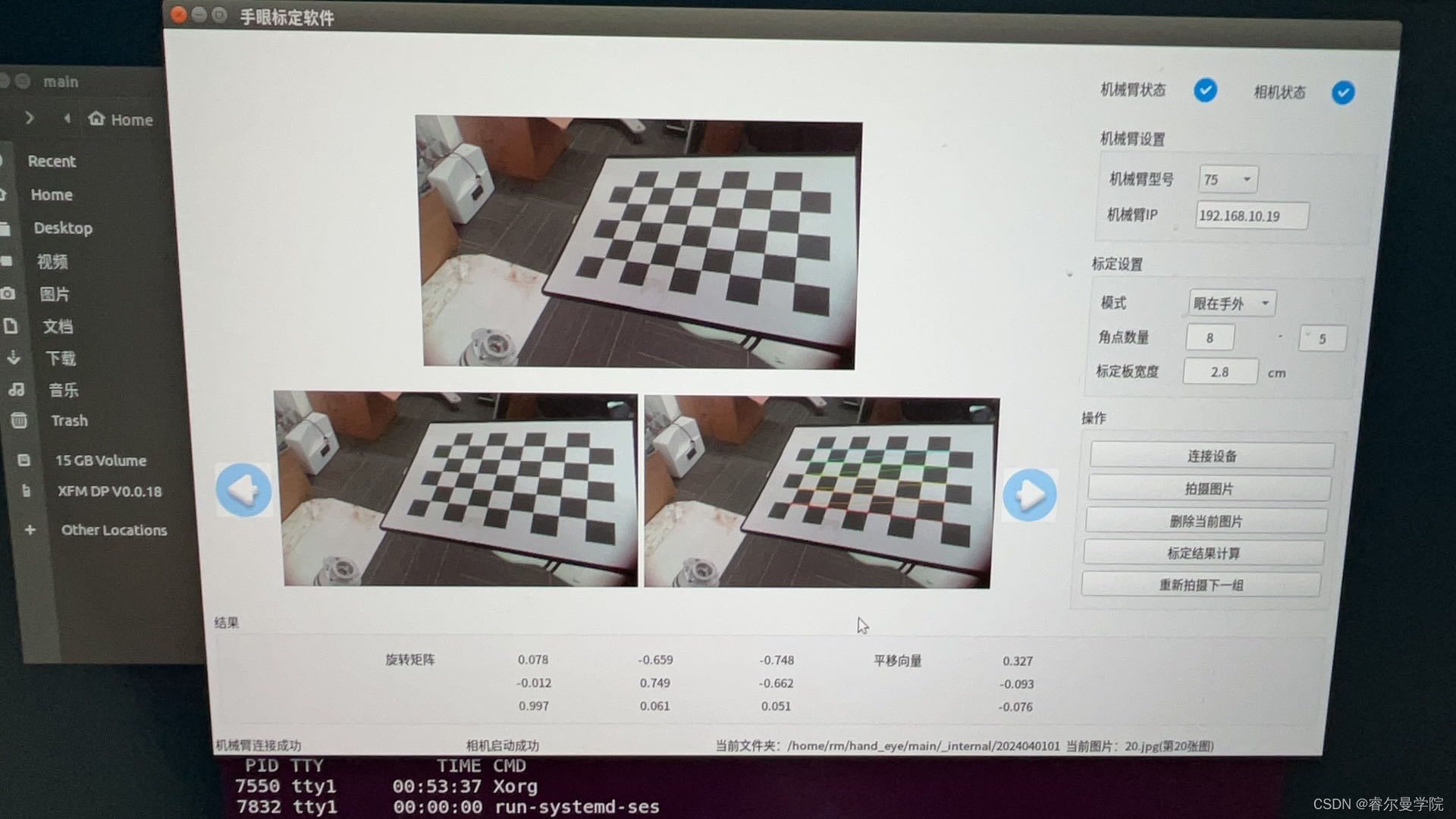
首次连接,选择机械臂型号,填入机械臂ip,选择标定模式,以及测量标定板的参数后填入,点击连接设备如下。

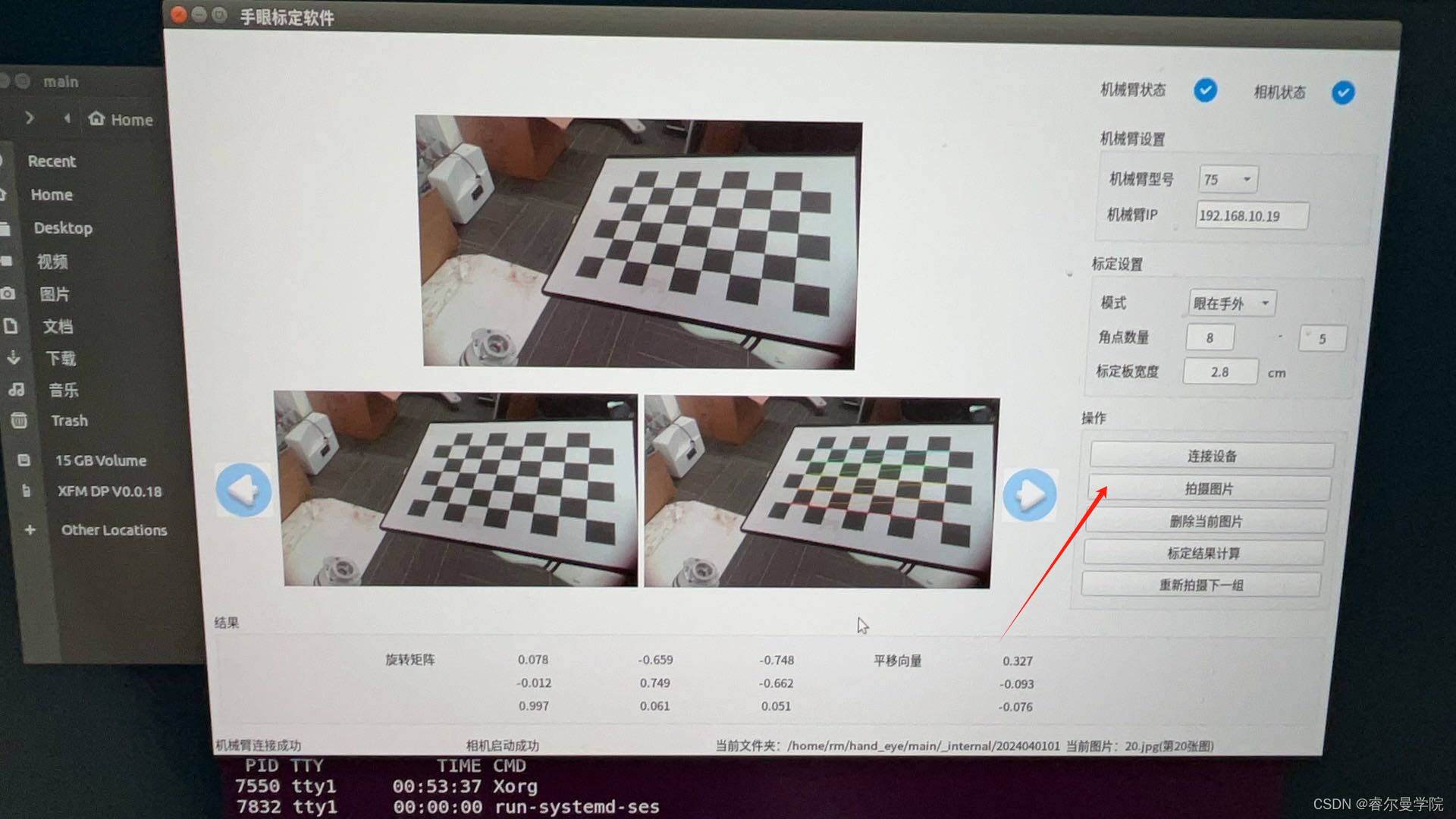
接下来将标定板固定在机械臂的末端,可以贴在灵巧手背面,然后进行图片的获取,变换不通的姿态,保证标定板在摄像头视野内部,然后点击拍摄图片进行图像获取。
获取20张图像后可选择15张获取比较好的进行标定
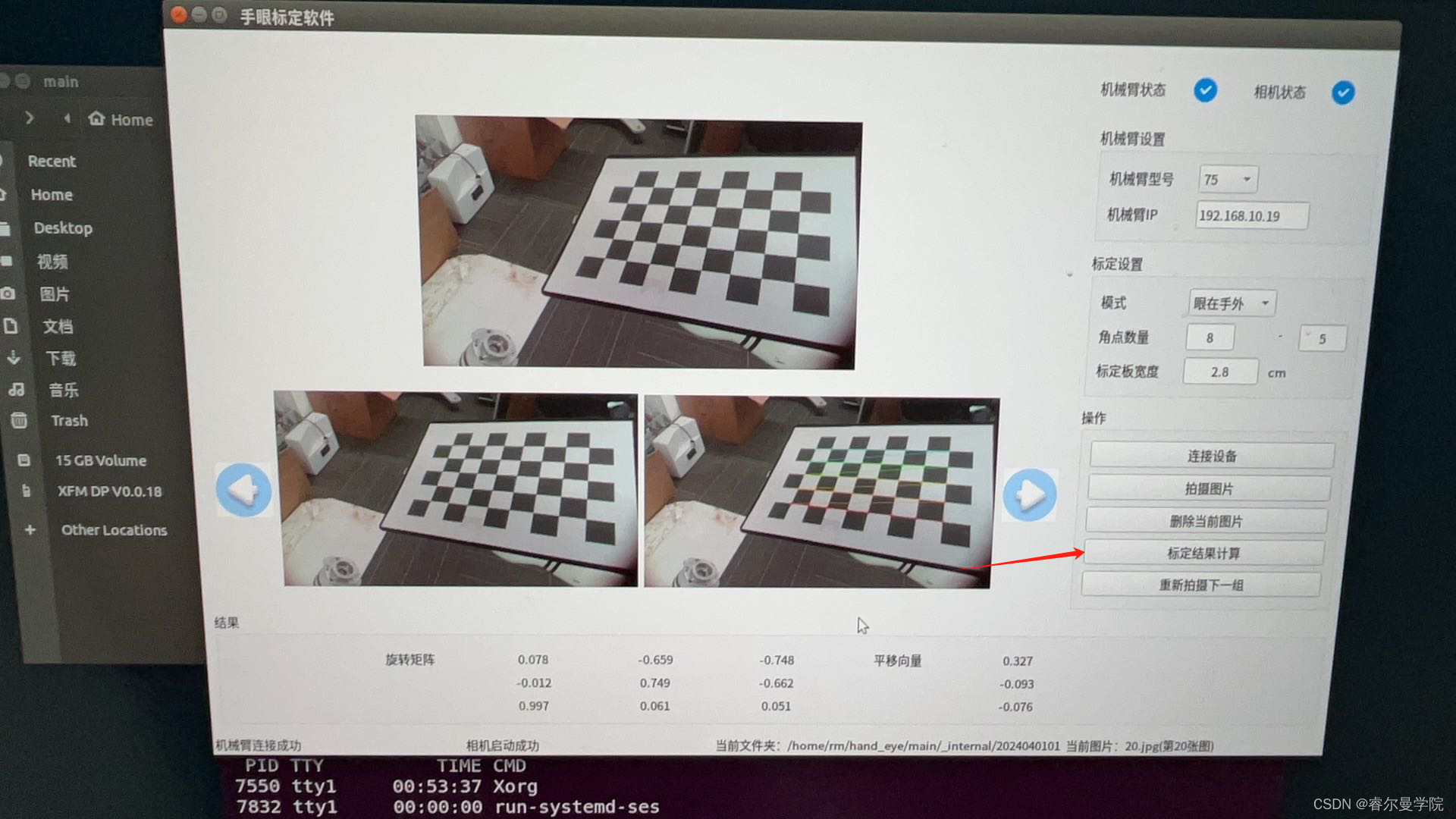
标定完成后会在下面计算出旋转矩阵和偏移向量如下
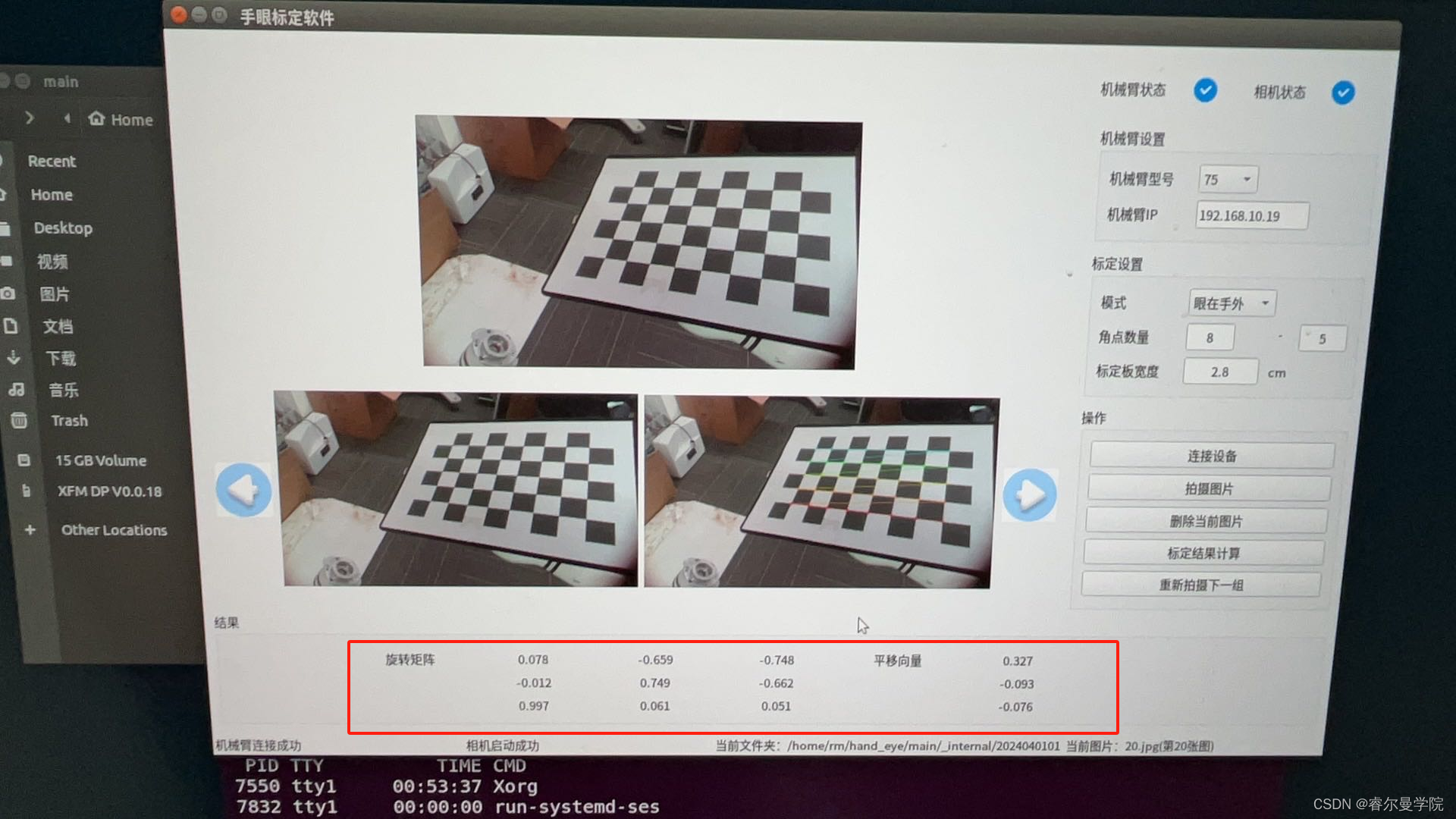
到此,我们的双臂复合机器人的手眼标定完成。
本文为二次转载,如有侵权请联系删除。
文章
11.92W+人气
19粉丝
1关注
更多数字孪生可视化干货内容






 扫一扫关注公众号
扫一扫关注公众号
 扫一扫联系客服
扫一扫联系客服
©Copyrights 2016-2022 杭州易知微科技有限公司 浙ICP备2021017017号-3  浙公网安备33011002011932号
浙公网安备33011002011932号
互联网信息服务业务 合字B2-20220090







