Unity实现物理与虚拟车间的联动(一)
时隔几年后更新:看到评论很多想要demo,其实内容上我基本已经比较详细写了怎么实现了,调用的也是基础的方法。这个项目做完也就没管过了,代码也都没有了。最近两年转做基于虚幻引擎的相关软件研制工作了,也会尽量挤时间分享下UE的学习记录。
对六轴机械臂的简单控制
上周开始做一个新项目,需要在Unity里实现一个六轴机械臂的实体与模型的联动。机械臂传输回来的数据包含每一个轴当前旋转的角度,当然,这个角度是机械臂自身按照自己的坐标系计算的。所以在Unity中要想实现转到同样的位置,必然还需要对数据进行角度转换。目前由于机械臂的通信还在调试,所以先在Unity中实现了对机械臂的简易控制。
本人是新手,所以实现方法可能不是最好的。但是分享出来供大家参考。
先贴上机械臂的图:

由于这个模型是别人做的,模型是由一块块小零件组合而成。如图:
可以看出来零件是非常多的,所以第一步我是按照每一个部分,将零件归类整理,这样方便下一步的操作,如图:
接下来就是要对每一个部分进行控制了。其实对机械臂的控制很简单,每一个关节只有旋转。所以首先想到的是能不能用Physics下面的joint呢?经过尝试以后,发现效果并不好。很难实现要求的按照传过来的角度进行控制。
于是我在网上查了很多资料,看到了这一篇帖子。
详细解释了Unity中的旋转
再经过一番思考,发现其实可以通过创建一个空物体,也就是一个点,将它作为父级,对应的机械臂上的模块作为子集。例如:

我在一轴加了一个点,然后把机械臂上面的所有部分作为它的子级,这时候,我只要旋转Z轴,就可以实现机械臂的左右旋转,其他几个关节同理,最后Hierarchy里面的视图是这样的
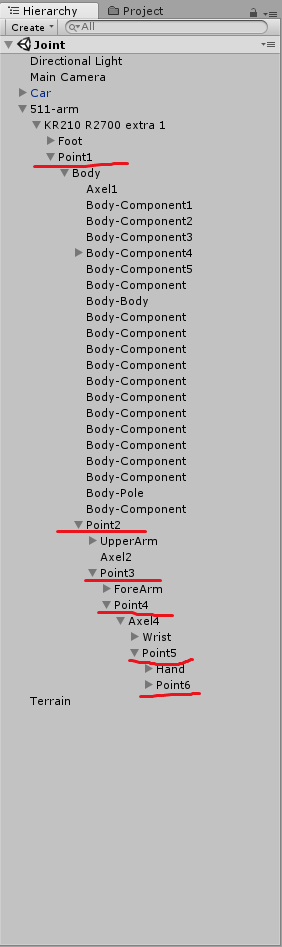
标注的红线就是我所添加的空物体,然后在Point1下面添加C#脚本。
代码如下:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Arm : MonoBehaviour {
public float speed1 = 0.1f;
public float speed2 = 0.1f;
public float speed3 = 0.1f;
public float speed4 = 0.2f;
public float speed5 = 0.2f;
public float speed6 = 0.2f;
GameObject Point1;
GameObject Point2;
GameObject Point3;
GameObject Point4;
GameObject Point5;
GameObject Point6;
// Use this for initialization
void Start ()
{
Point1 = GameObject.Find("Point1");
Point2 = GameObject.Find("Point2");
Point3 = GameObject.Find("Point3");
Point4 = GameObject.Find("Point4");
Point5 = GameObject.Find("Point5");
Point6 = GameObject.Find("Point6");
}
// Update is called once per frame
void Update()
{
if (Input.GetKey(KeyCode.A))
{
//一轴左转
Point1.transform.Rotate(0,0,-speed1);
}
if (Input.GetKey(KeyCode.D))
{
//一轴右转
Point1.transform.Rotate(0, 0, speed1);
}
if (Input.GetKey(KeyCode.W))
{
//二轴向前
Point2.transform.Rotate(0,0,speed2);
}
if (Input.GetKey(KeyCode.S))
{
//二轴向后
Point2.transform.Rotate(0, 0, -speed2);
}
if (Input.GetKey(KeyCode.UpArrow))
{
//三轴向上
Point3.transform.Rotate(0, 0, -speed3);
}
if (Input.GetKey(KeyCode.DownArrow))
{
//三轴向下
Point3.transform.Rotate(0, 0, speed3);
}
if (Input.GetKey(KeyCode.Q))
{
//四轴逆时针
Point4.transform.Rotate(speed4, 0,0 );
}
if (Input.GetKey(KeyCode.E))
{
//四轴顺时针
Point4.transform.Rotate(-speed4, 0, 0);
}
if (Input.GetKey(KeyCode.Alpha1))
{
//五轴向上
Point5.transform.Rotate(0,0, -speed5);
}
if (Input.GetKey(KeyCode.Alpha2))
{
//五轴向下
Point5.transform.Rotate(0, 0,speed5 );
}
if (Input.GetKey(KeyCode.LeftArrow))
{
//六轴逆时针
Point6.transform.Rotate(speed6, 0, 0);
}
if (Input.GetKey(KeyCode.RightArrow))
Point6.transform.Rotate(-speed6, 0, 0);
{
//六轴顺时针
}
}
}
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/weixin_41975033/article/details/84671672
文章
12.7W+人气
19粉丝
1关注
更多数字孪生可视化干货内容






 扫一扫关注公众号
扫一扫关注公众号
 扫一扫联系客服
扫一扫联系客服
©Copyrights 2016-2022 杭州易知微科技有限公司 浙ICP备2021017017号-3  浙公网安备33011002011932号
浙公网安备33011002011932号
互联网信息服务业务 合字B2-20220090







